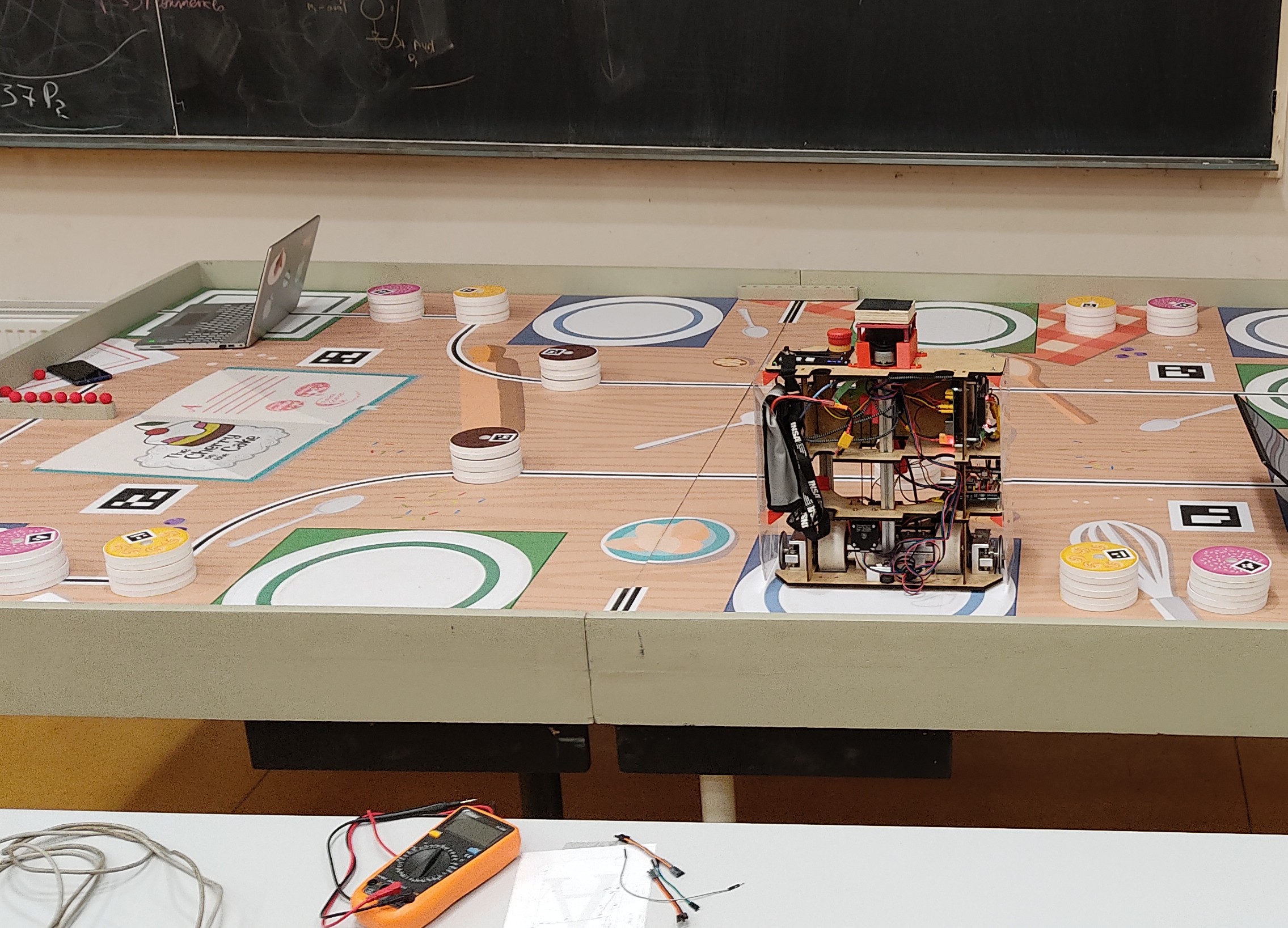
Clubelek Competition Robot
At Clubelek – INSA Lyon, I contributed to the development of a competition robot for the French Robotics Cup, working on module coordination, systems integration, and robot autonomy. My work focused on robot localization and path planning in a ROS-based robotics environment, using Python and C/C++ to support reliable behavior during competition tasks.
Mobile Robotics ROS / ROS 2 Robot Localization Systems Integration