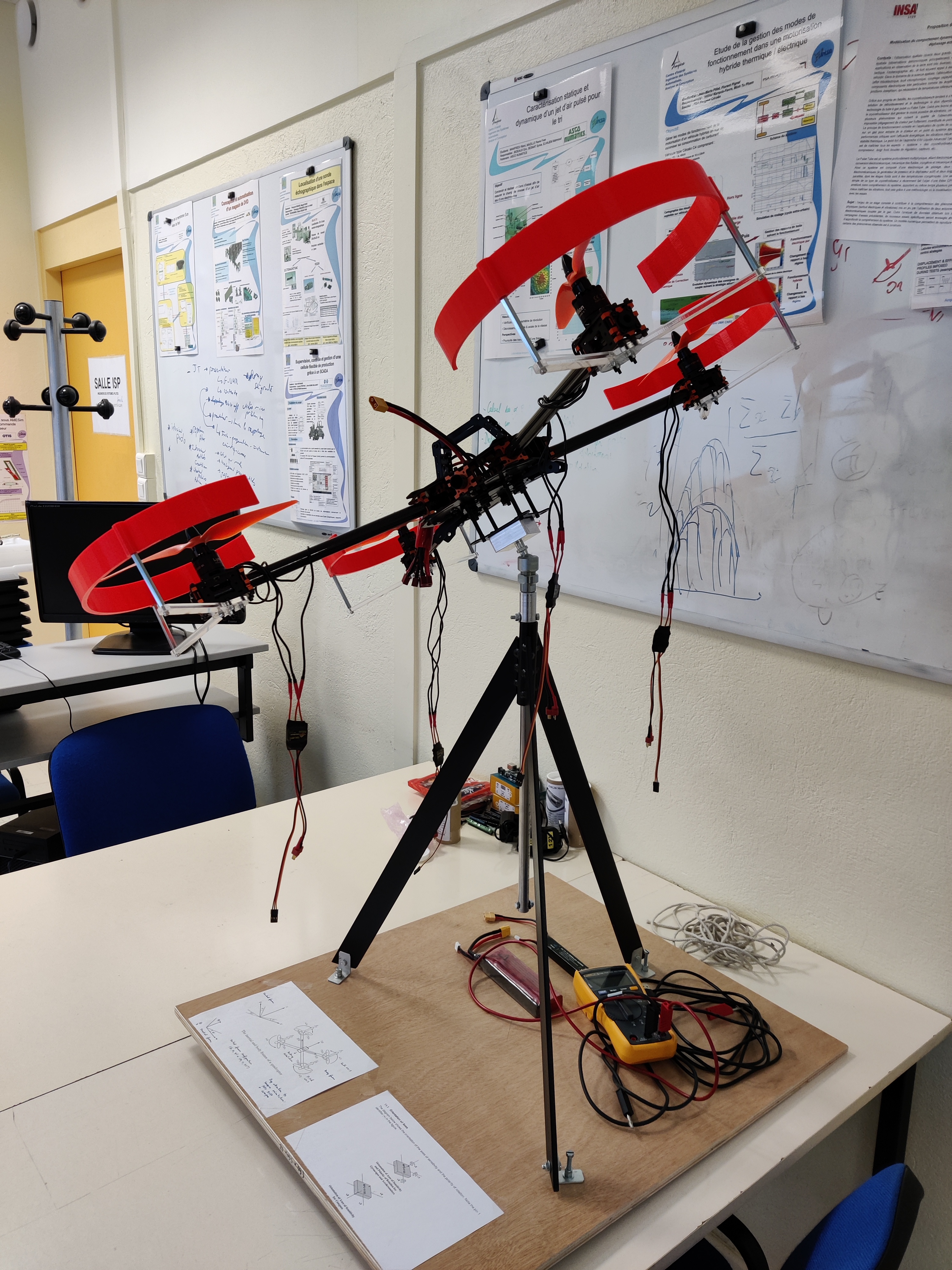
Quadcopter Testbed
At Ampère Laboratory – CNRS UMR 5005, I developed a quadcopter testbed intended to support practical teaching in flight dynamics and aerospace systems control. The project covered the full workflow from flight dynamics modeling and MATLAB/Simulink simulation to the design, assembly, and testing of a real quadcopter prototype and a 4-degree-of-freedom test bench. I designed and tuned a PID-based attitude controller for the Simulink model and its implementation on the prototype using Arduino hardware, IMU sensing, ESC-driven BLDC motors, and real-time experimental validation.
Quadcopter Flight Dynamics MATLAB/Simulink PID Attitude Control Arduino Embedded Control